Bumblebee Xカメラのステレオパラメータ設定
このアプリケーションノートでは、Bumblebee Xステレオカメラの設定パラメータを説明します。
SpinViewによるBumblebee Xカメラの設定
このアプリケーションノートに記載した設定は、SpinViewアプリケーションのStereoまたはFeaturesタブからアクセスできます。
SpinView上で、カメラモデルをクリックして設定を開きます。
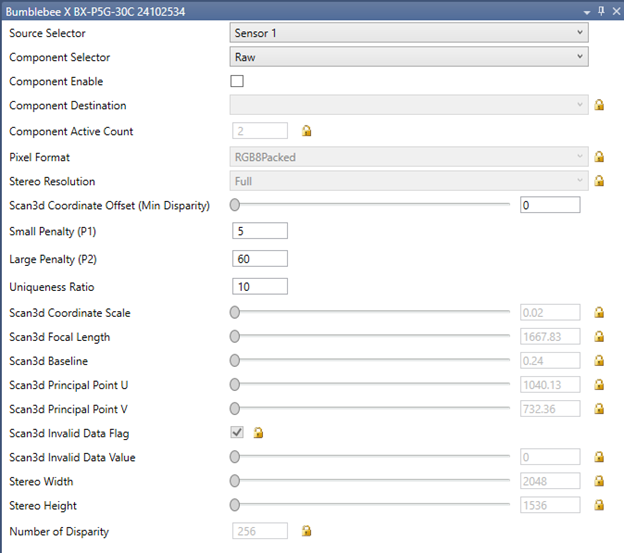
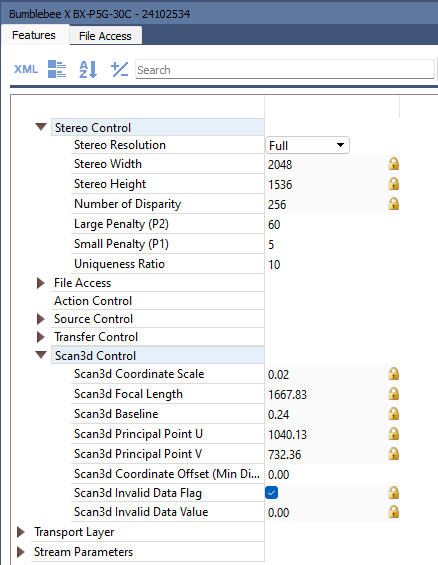
| Windows - ステレオタブをクリックするとパラメータが表示されます | Linux - タブをクリックするとパラメータが表示されます |
 |
 |
ストリーム設定
Components
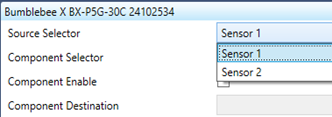
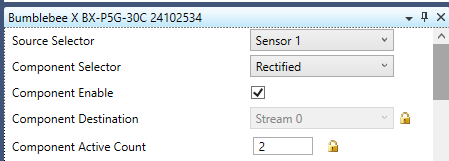
1. Source Selectorからソースを選択し、センサー1(左)またはセンサー2(右)を選びます。
| Windows | Linux |
 |
 |
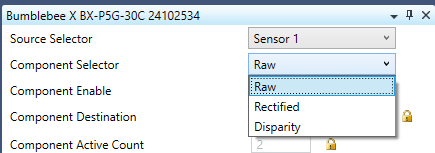
2. Component Selectorから、コンポーネントを選択します。センサー1ではRaw、Rectified(歪み補正)、視差のなかから、センサー2はRawまたはRectified(歪み補正)の中から選択します。
| Windows | Linux |
 |
 |
3. Component Enableをクリックして、選択したコンポーネントを有効化します。
| Windows | Linux |
 |
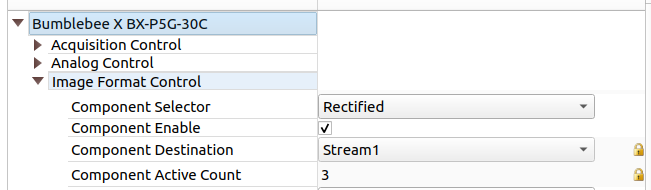 |
Component Destinationにはコンポーネントの送信先ストリームが表示されます。コンポーネントが有効化される度に、更新されます。Component Active Countには、アクティブ化されたコンポーネント数が表示されます。イメージ伝送に必要なコンポーネントをアクティブ化して、各コンポーネントの送信先を見て、取得モードに入る前にどのストリームがどのコンポーネントに割り当てられているかを決定します。
ピクセルフォーマット
![]()
カラーカメラでは、RAWおよび歪み補正画像は初期設定ではRGB8Packed形式で出力されますが、YUV422Packed形式で出力することも可能です。これにより、標準のRGB8Packed形式に比べて必要なバイト数を33%削減できます。これにより、同じ解像度で高いフレームレートを実現できます。視差画像には影響しません。RAWおよび歪み補正画像はRGB12フォーマットの出力にも対応し、その場合ビット深度は高くなりますが、帯域幅をより必要とするため、フレームレートは低くなります。ピクセルフォーマットの選択は、RAW左、RAW右、歪み補正左、歪み補正右の画像に適用されます。ピクセルフォーマットの変更は4つのストリーム全てに影響します。
モノクロカメラの場合、RAWおよび歪み補正画像は初期設定ではMono8フォーマットで出力されますが、Mono12Packedでも出力できます。この場合、ビット深度は高くなりますが、帯域幅をより必要とするため、フレームレートは低くなります。
| 詳しくは、説明動画をご覧ください。 |
|
ステレオ解像度の設定
ステレオ解像度ではステレオ処理の出力を選択します。ステレオ解像度はStereo WidthとStereo Heightから確認できます。
ステレオ解像度は歪み補正画像と視差画像のみに対応します。RAW画像はフル解像度で保持されます。
Bumblebee X XC3 60°およびXC5 80° FOVモデルのアスペクト比は4対3です。フル解像度は2048 x 1536で、クオーター解像度は1024 x 768です。
Bumblebee X Bumblebee X XC7 105° FOVモデルのアスペクト比は16対9です。フル解像度は2048 x 1152で、クオーター解像度は1024 x 576です。
高解像度であるほどより詳細な視差精度が得られますが、処理能力が必要です。より高速な性能が求められる用途では、クォーター解像度が最適な選択肢となる場合があります。
| 詳しくは、説明動画をご覧ください。 |
|
ノイズ低減パラメータの設定
画像ノイズに影響を与える要因として、いくつかのパラメータがあります。
| パラメータ | 説明 | 可能な値 | 推奨値 |
| Uniqueness Ratio | 最良のコストが次に良いコストよりも優れていると認められるためのマージン。この比率が大きいとノイズの多いデータポイントが除去され、3Dデータポイントの数が減少します。 | 0 - 100 | 10 |
| Maximum Speckle Size | ノイズスペックルの影響を評価し、無効化する際に考慮すべき視差領域の最大サイズ | 1 - N/A | 40 |
| Speckle Threshold | スペックルのフィルタリングの際、接続した構成部品で許容される最大視差偏差 | 0 - 255 | 4 |
| 詳しくは、説明動画をご覧ください。 |
|
Minimum Disparityの設定
Minimum DisparityはScan 3D Coordinate Offsetパラメータで設定します。これは画素を相対座標からワールド座標に変換する際のオフセットです。これは最小視差と等価です。0から768の範囲で設定します。カメラから遠い物体ほど小さな値にします。カメラに近い物体ほど大きな値にします。
| 詳しくは、説明動画をご覧ください。 |
|
ステレオペナルティの設定
Small Penalty (P1)は隣接するピクセル間の視差変化が1ピクセルである場合のペナルティです。このパラメータを小さくすると、深度が比較的緩やかに変化する傾斜面での処理が改善されます。1から255の範囲で設定します。初期値は5です。P1を低く設定すると、深度変化がより滑らかになり、P1を高く設定すると、小さな変化に対する感度が低下します。
Large Penalty (P2)は隣接するピクセル間の視差変化が1ピクセルを超える場合のペナルティです。背景に対する物体のエッジなど、深度が急激に変化する場合は、このパラメータを小さくすると効果的です。Large PenaltyはSmall Penaltyより大きい値にしてください。1から255の範囲で設定します。初期値は60です。P2が高く設定すると、視差の急激な変化が抑制され、ノイズが最小限に抑えられて鋭いエッジも滑らかになります。
| 詳しくは、説明動画をご覧ください。 |
|