モバイルマッピングのためのイメージング: 高解像度だけではない
本書では、モバイルマッピングにおけるイメージング技術の主要な要素について探ります。高解像度、画像品質、空間精度、そして正確なタイミングが、ビジネス意思決定に影響を与える重要な要素であることを強調しています。また、データ取得から意思決定までの簡略化されたフレームワークを示し、処理能力の進歩とそれがモバイルマッピングアプリケーションに与える影響についても述べています。
はじめに
The Teledyne FLIR Integrated Imaging Solutionsは、25年以上にわたり、産業用マシンビジョンおよびマルチセンサーデバイス向けのカメラを専門に開発してきました。本稿では、モバイルマッピングにおいて高解像度イメージングがいかに重要であるか、そしてそれを支える重要な要素について紹介します。

モバイルマッピングの簡略化されたフレームワーク
夕食のレストランを選ぶ際、モバイル マッピング アプリケーションを使用して特定の近隣地域内を検索し、意思決定を行うということがよくあります。レストランの評価、価格帯、場所、移動時間、駐車場の有無などの条件を適用すると、候補のリストが表示されます。リスト内のオプションをクリックすると、料理の写真、店舗の外観、360度のストリートビュー画像などの情報にアクセスでき、雰囲気を確認することができます。画像とメタデータの両方を組み合わせることで、どのレストランに行くかをより適切に判断できます。
モバイルマッピングのコンテクスト
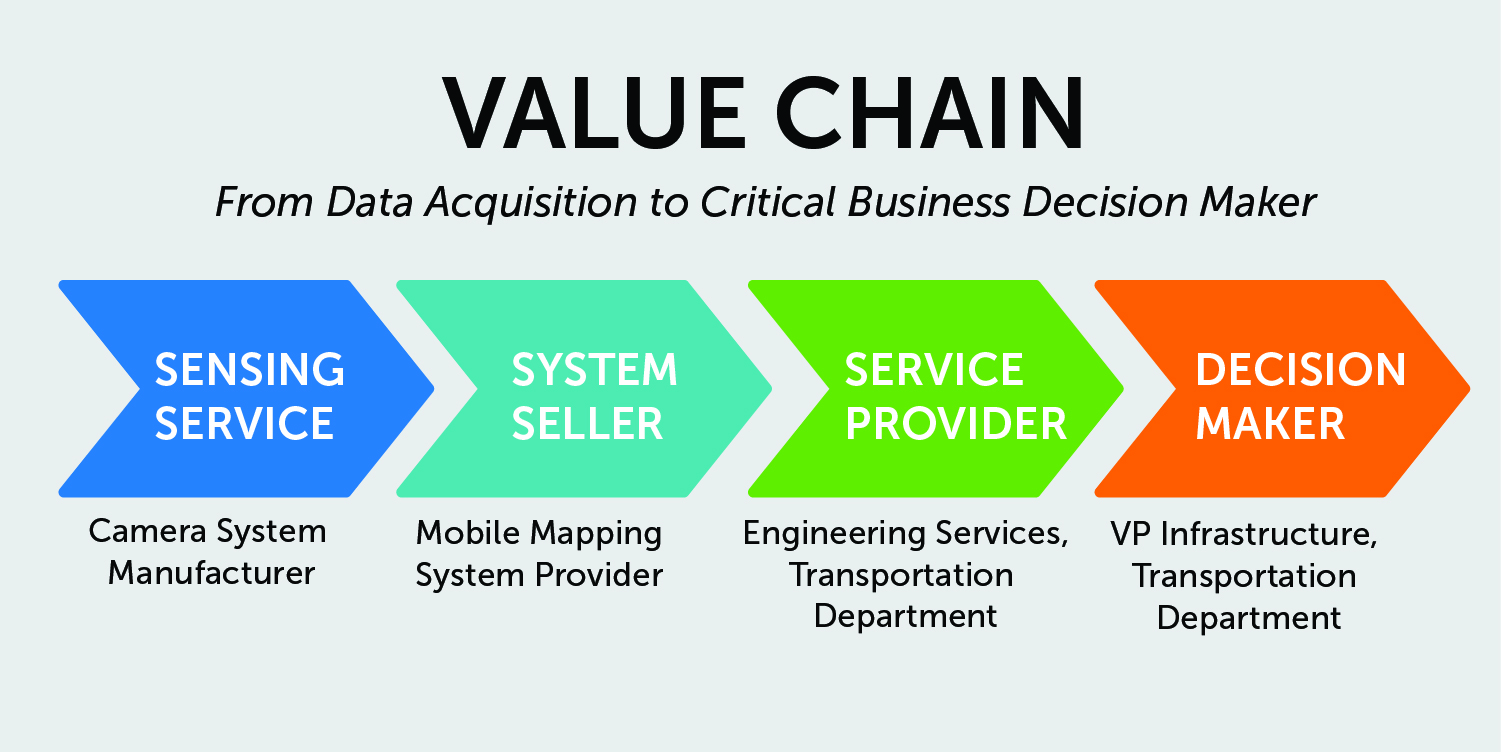
モバイルマッピングのコンテクストでは、プロセスはカメラシステムメーカーがデバイスをシステム販売業者に提供するところから始まります。システム販売業者はそのカメラをモバイルマッピングシステムに統合し、サービスプロバイダーに提供します。サービスプロバイダーは撮影計画を立て、データを取得・処理して意味のある情報を抽出します。
意思決定者は、実際に生データや他のセンサーデータを見ることはほとんどありません。彼らが関心を持つのは、実行可能なインサイトです。たとえば、次に修復が必要な道路はどこか、腐食の兆候が見られる老朽化した電柱を特定して即時交換すべきかどうかなどです。彼らが求めているのは、来年度の限られた予算をどのように配分すべきかという提案とその根拠です。
この例は、画像データがどのようにバリューチェーン全体に組み込まれ、重要な意思決定を支えているかを示しています。
解像度以外に考慮すべき要素
前述の例に基づき、解像度に加えて以下のような要素も考慮する必要があります。
画像品質

モバイルマッピングを評価する際、最初に考慮すべき要素は画像品質です。高品質な画像を提供するカメラシステムは、サービスプロバイダーが意思決定者にとって有益な情報を抽出することを可能にします。現在では、人間のオペレーターだけでなく、コンピュータビジョンソフトウェアもこのプロセスに関与しています。モバイルマッピングの価値は、大量のデータを迅速かつ正確に処理し、関連情報を導き出すシステムの能力にあります。情報抽出はコンピュータビジョンソフトウェアによって行われ、これらのアルゴリズムは定量的で、客観的かつ精密です。画像品質の要素として、広いダイナミックレンジは、暗部と明部の両方の詳細を可視化し、アルゴリズムがシーンを細かく分割することを可能にします。正確な色情報とテクスチャは分類時の信頼性を高め、各セグメントをオブジェクトカテゴリに分類することを可能にします。シャープネス(鮮明度)も重要で、光学文字認識(OCR)アルゴリズムがシーン内の資産に表示された英数字を識別し、識別子を抽出して資産にタグ付けすることを可能にします。画像品質、ダイナミックレンジ、色の正確性、画像の鮮明度など、これらすべての要素はモバイルマッピングにおいて非常に重要です。
幾何学的モデリングと空間精度

イメージングシステムにおける第二の重要な考慮事項は、幾何学的モデリングと空間精度です。これらの要素は、カメラで取得されたデータを処理し、画像内の物体の位置を正確に特定し、他のセンサーデータと画像データを登録するために不可欠です。例えば、カメラ画像と同時にレーザースキャンデータを取得する場合、後処理で各3Dポイントに正しい色値を適用することが望ましいです。幾何学モデル(カメラの内部パラメータ)は、センサーとレンズの関係を定義します。すべてのレンズには歪みがあるため、空間精度を確保するにはこの歪みをモデルに反映させることが重要です。
例として、眼科検査では視力の鮮明さや拡大の必要性を評価します。乱視では、目の前の物体は焦点が合っていても、周囲の物体はぼやけて見えることがあります。これは、眼のレンズが完全な円形でないため、光が網膜に届く際に不均一に屈折するためです。眼鏡の処方は、すべての物体が焦点に合うように乱視を補正します。
幾何学的モデリングでは、これはカメラを校正して空間精度を一貫して設定することに相当します。空間精度は、物体の表現が実際の位置とどれだけ一致しているかを測定します。例えば、ある人が10メートル離れた他人のシャツのボタンを見ているとき、そのボタンのXY位置が数センチまたは数ミリ単位で正確に特定される必要があります。数メートル離れた場所からミリメートル単位の精度を得るには、レーザースキャンデータが求められることがあります。このため、カメラとレーザースキャナーの両方を備えたモバイルマッピングシステムが、一貫した空間精度にとって不可欠です。
タイミング

モバイルマッピングにおけるもう一つの重要な要素はタイミングです。これは、通常外部ソースによって開始されるトリガー決定のタイミングを指します。例えば、フリーランニングモードでイメージングシステムを操作すると、毎秒一定数のフレームがキャプチャされ、滑らかな再生が必要なビデオなどの用途に適しています。しかし、モバイルマッピングでは、経路に沿って最適なカバレッジでデータを取得し、画像間の距離を一定に保つことでフレーム間の重なりを確保する必要があります。この方法は、ストレージ消費を最小限に抑え、処理リソースの効率を最大化し、プロジェクト完了までの時間を短縮します。
距離測定装置(DMI)などの外部デバイスを使用して、移動距離をデジタルパルスで示すことで、トリガーを開始するのに役立ちます。この方法は、ミッションのカバレッジを最適化しながら、ストレージ消費と後処理時間を最小限に抑えるのに有効です。
タイミングは同期にも重要です。モバイルマッピングシステムには、GPSや位置情報システムなどの他の主要な機器が含まれていることが一般的で、これらはタイムスタンプと現在位置を提供します。正確な位置情報は、その場所で取得された色情報の空間精度と関連しています。また、サーマルカメラやレーザースキャナーなどの追加センサーが含まれることも珍しくありません。トリガーが発生した時間と場所を把握することで、地理空間データの登録が可能になります。例えば、レーザースキャンの点群における3D位置を使用し、その時点でカメラが捉えた色値を参照することができます。このような地理空間データの融合により、単一のデータセットでは得られない情報が得られることがあります。
モバイルマッピング機器の評価

モバイルマッピング機器の購入は大きな投資であり、現場で一貫して信頼性のある運用が求められます。高解像度画像を取得するシステムを評価する際に考慮すべき追加の要素は以下の通りです:
- メーカーが業界でどれくらい実績をもつか。このエコシステム内での評判はどうか。複数のシステムを購入した場合、品質と性能に一貫性があるか
- 製品がモバイルマッピングの過酷な条件に耐えられる設計になっているか。温度、湿度、衝撃、振動などの変化する気象条件が運用に影響を及ぼすが、そうした現場での実績はあるか。
- メーカーは複数年の保証と、迅速かつ専門的なサポートを提供しているか。
これらの要素は、モバイルマッピングシステムへの投資を最大限に活用するために不可欠です。
処理能力の進歩

現在、処理能力は指数関数的に進化しており、処理単位あたりのコストは時間とともに継続的に低下しています。この進歩により、高解像度センサーによるデータ取得が可能となり、モバイルマッピングの応用範囲が拡大しています。約20年前、Googleはストリートビューを導入しました。現在では、モバイルマッピングは、工学的調査のためのシーン分割、資産管理、舗装状態の評価、都市森林管理などを含むようになっています。
また、処理能力の向上により、バリューチェーンの中でのデータ分析と情報抽出の部分が大幅に強化されました。GPU(グラフィックス処理ユニット)やNPU(ニューラル処理ユニット)**の進化により、AIや機械学習技術を用いて大量のデータを高いコンフィデンスレベルで処理するアルゴリズムが登場しています。これらの進歩は非常に印象的であり、またこれからも進歩していきます。
これらの手法は結果を出す上で非常に進歩していますが、高い空間精度と正確なトリガータイミングで高解像度の画像データを最高品質で取得することで、重要なビジネス上の意思決定に最適な結果が得られることを認識することが重要です。
結論
モバイルマッピング向けのイメージング技術の進歩により、データ取得の品質は大幅に向上しました。高解像度、優れた画像品質、空間精度、そして正確なタイミングは、モバイルマッピングおよび重要なビジネス意思決定に不可欠です。これらの技術的向上により、収集されたデータから意味のある情報を抽出することが可能となり、より良い意思決定と最適なリソース配分につながります。処理能力の進歩を活用し、センサーフュージョンと組み合わせることで、環境に対する包括的な理解が得られ、モバイルマッピングのさらなる利点を引き出すことができます。