解像度を超えて:モバイルマッピング用のカメラシステムに本当に必要なものとは
画素数は多いに越したことはありません。ただ、精度、信頼性、そして適切なタイミングの正確なデータも重要です。
よく聞くのは「高解像度のカメラが必要です」ということです。
確かに画素数が多いほうが良いのですが、モバイルマッピングでは、それは全体のほんの一部に過ぎません。
都市インフラの撮影、道路点検、資産管理など、様々な用途において、画像の品質が後工程での決定を左右します。画像がどれだけ鮮明かというだけではなく、使いやすさ、正確さ、同期の精度が重要です。
当社は、モバイルマッピングプラットフォームを構築するシステムインテグレーター、エンジニア、現場チームと長年にわたり協働してきました。そして次のことを学びました。解像度だけが問題なのではないのです。実際の使用環境で、画像システム全体がどれだけ適切に機能するかが重要なのです。
画質について(解像度とは異なります)
現在ではメガピクセルの画像データをいくらでも集められます。しかし、その画像が不鮮明であったり、露出オーバーで陰影が曖昧な場合、使えるデータにはなりません。
モバイルマッピングに必要な画質の条件は、以下の通りです。
- 鮮明度 — アルファベットや数字を組み合わせた標識、道路標識、細かい特徴などを明確にとらえること
- ダイナミックレンジ — 明るい空から影のさす歩道の縁石まで、細部を忠実に再現すること
- 色の正確性 — AIやマシンビジョンシステムにより、セグメンテーションと分類の精度を向上すること
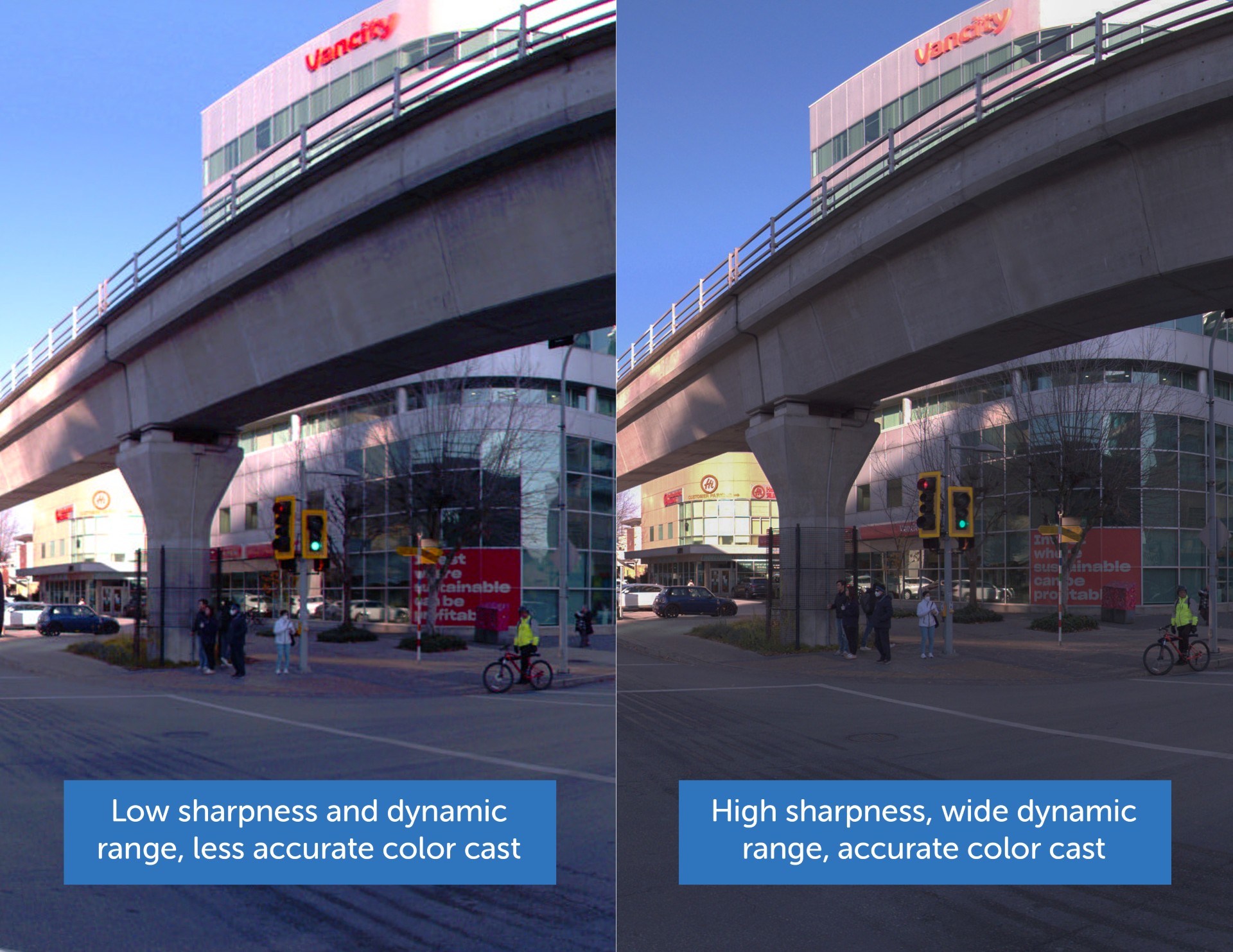
看板のロゴ、信号機のエッジ、建物の影を比較します。右側には、より鮮明な詳細、バランスの取れた露出、より自然な色が表示されます。これは、正確な AI セグメンテーションとマッピングに不可欠です。
これがコンピュータビジョンを効果的なものにします。道路沿いの資産の特定でも道路表面の状態の評価にでも、コンピュータビジョンのAIアルゴリズムと、その結果を判定する人間にとって必要なのは、クリアで一貫した入力です。解像度だけで全て解決できるわけではないのです。これは特にデータを他のセンサー出力と正確に一致させる必要がある場合、顕著に当てはまります。ここで、空間精度が鍵となります。
精度はGPSだけによるものではなく、レンズからはじまります
GPSやIMUがあらゆる地理空間測位を担うと考えるのは当然です。しかし、カメラが幾何学的に正確な画像を取得していなければ、その後の工程(LiDARフュージョン、カラーオーバーレイ、GIS整合性)でずれが生じます。
カメラは適切に校正しなければなりません。レンズの歪みをモデル化し、補正する必要があります。カメラの内部特性は、想像以上に重要です。

信号機のポールと建物の端を観察してください。RAW画像では、レンズの歪みにより目に見える湾曲を引き起こしています。キャリブレーション後、直線が復元されます。これは、モバイル マッピングにおける LiDAR および空間データとの正確な位置合わせに不可欠です。
点群データをミリメータ単位の精度で活用しようとして、画像のミスマッチに苦戦するのを見てきました。これはGPSの問題というより、カメラが適切に校正されておらず、レンズの歪みが補正されていないため、幾何学的な一貫性が保たれないことが問題なのです。
もちろん、正確な測位はタイミングが同期されていることが大前提です。これが、モバイルマッピングで最も見落とされがちで重要な要因の一つです。
トリガータイミング:見えないけれど、極めて重要な要素
タイミングは後回しにされやすいのですが、そうすべきではありません。
トンネルや道路のマッピングでは、フレームを取得するだけでなく、そのフレームとシステムの全てのセンサーとの整合性をとる必要があります。
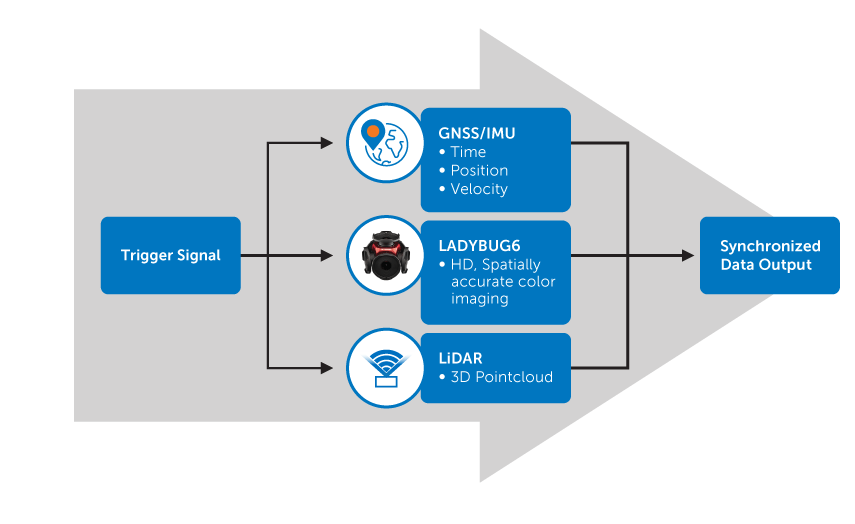
ここで、トリガーが必要となります。DMI (Distance Measurement Instrument) などの外部シグナルを使う場合、カメラは正確で反復可能なタイミングで応答する必要があります。これにより、フレーム間の空間の一貫性が保たれ、LiDAR、GNSS、IMUデータと厳密に整合性をとることができます。
また、後処理工程の時間も短縮できます。よりスマートなデータ取得のできるシステムほど、より高速な処理が可能です。
画像が鮮明でタイミングが合っていても、カメラが実際の使用環境で耐えられなければ、意味がありません。
フィールドへの対応力が想像以上に重要
書類上では、多くの画像システムが優れたものにみえますが、現場で使ってみると問題が生じます。
モバイルマッピングでは、衝撃や振動、雨、熱、塵埃の影響を受けます。その場合でも、カメラシステムは校正された状態を維持し、性能の劣化なく機能する必要があります。信頼性の確保は仕様上だけなく、プロジェクトを前進するために必須なのです。

複数日にわたる調査や、時間制限のある現場での作業の場合、画像システムが弱点にならないよう備えておく必要があります。
カメラシステム選定にあたっての推奨事項
モバイルマッピング用カメラシステムを評価する際の確認事項を挙げます。
- 画質はユーザーやツールに必要なもの全てに対して十分か
- 歪みは補正済みか、後処理での修正が必要か
- DMIから、または必要なタイミングで、適切にトリガーできるか
- 現場で実証済みか、それとも紙の上だけのものなのか
- もし5つ購入した場合、全て同じように動作するか
上記の5項目に「はい」と言えない場合、その理由を考える必要があります。
そして、プロジェクトにおいて、超高精細画像などさらに高度な要求が発生した場合にどうするかも検討する必要があります。
100 MPを超える場合はどうするか
画質は画素数だけで決まるわけではないものの、解像度はやはり重要です。拡大、セグメンテーション、3次元再構成など、後工程で超高解像度の画像が必要となる場合、この点は特に重要です。
この場合、多くの画素を取得すればいいのではなく、フレーム全体にわたる正確なアライメントと一貫した幾何学的出力を確保する必要があります。ここがLadybug6のようなシステムの強みです。元々の解像度は73.6MPですが、リサンプリングにより最大134MPの出力を生成可能で、球面を完全にカバーし、視差誤差もありません。これにより、モバイルマッピングにおいて、整合性や画質で妥協することなく、高解像度の要件を満たすことができます。
Ladybug6がどのように高精細全天球イメージングを実行するか, 詳しく見る