Bumblebee X相机立体参数配置
本应用说明介绍了配置Bumblebee X立体相机的一些参数。
使用SpinView配置Bumblebee X相机
本应用说明中描述的大部分设置都可以通过SpinView应用程序中的Stereo或Features标签页进行访问。
在SpinView中,点击相机型号即可进入设置界面。
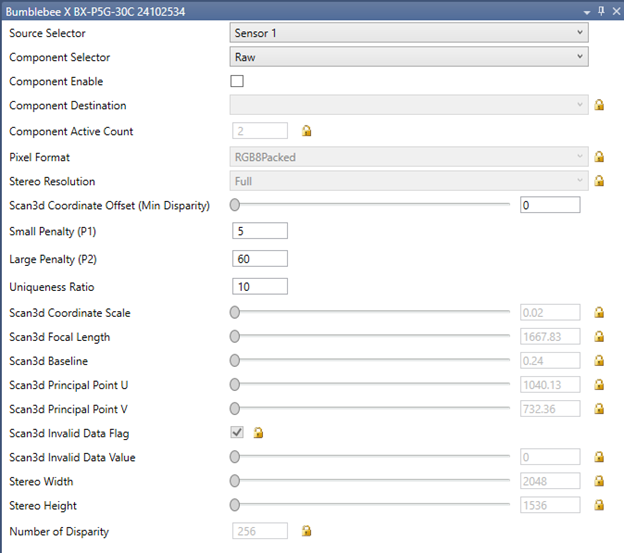
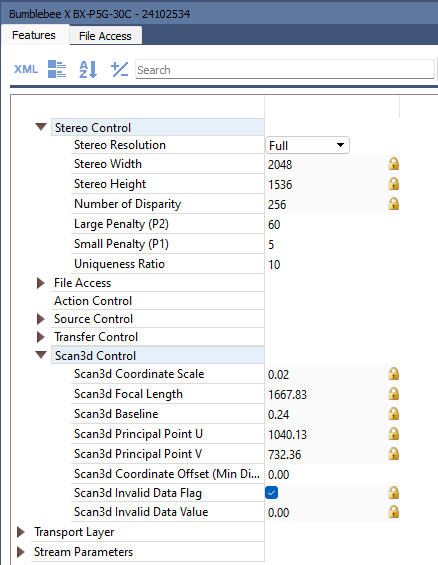
| Windows:点击Stereo标签页查看参数 | Linux:点击Features标签页查看参数 |
 |
 |
配置图像流
组件
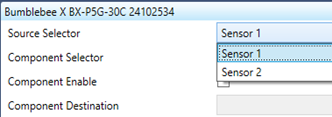
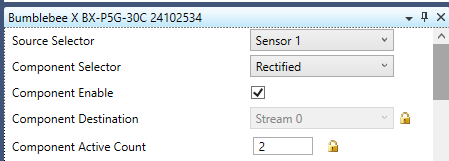
1.从源选择器中选择源—传感器1(左)或传感器2(右)。
| Windows | Linux |
 |
 |
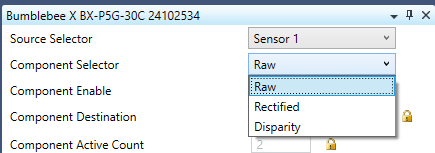
3.点击“组件启用”(Component Enable)以启用选定组件。
| Windows | Linux |
 |
 |
3. Click Component Enable to enable the selected component.
| Windows | Linux |
 |
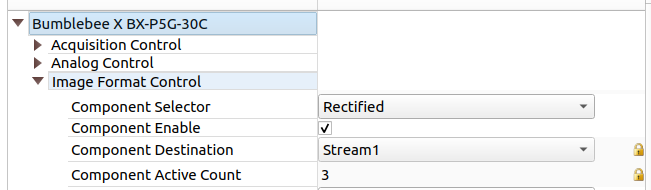 |
“组件目标”(Component Destination)表示组件的目标图像流。启用更多组件时,该目标会更新。“组件激活计数”(Component Active Count)表示已激活的组件数量。在进入采集模式之前,启用所需的组件并查看每个组件的目标图像流,确定每个组件对应的图像流
像素格式
![]()
对于彩色相机,原始图像和校正图像默认以RGB8Packed格式输出,但也可以选择YUV422Packed格式输出,相较于RGB8Packed格式,后者的字节需求减少33%。从而提高相同分辨率下的帧率。视差图像不受影响。原始图像和校正图像还可以输出为RGB12格式,这种格式具有更高的位深,但由于具有其他的带宽要求,帧率会较低。像素格式选择适用于左、右原始图像及左、右校正图像;任何像素格式的更改都会影响这四个图像流。
对于黑白相机,原始图像和校正图像默认以Mono8格式输出,但也可以选择Mono12Packed格式输出,这种格式具有更高的位深,但由于具有其他的带宽要求,帧率会较低。
| 有关示例请观看教学视频 |
|
配置立体分辨率
立体分辨率选择立体引擎输出的分辨率。通过立体宽度和Stereo高度可以查看立体分辨率。
立体分辨率仅指校正图像和视差图像的分辨率。原始图像保持全分辨率。
Bumblebee X XC3 60°和XC5 80° FOV模型的纵横比为4:3。全分辨率为2048×1536,四分之一分辨率为1024×768。
Bumblebee X XC7 105° FOV模型的纵横比为16:9。全分辨率为2048×1152,四分之一分辨率为1024×576。
较高的分辨率能提供更多细节和更好的视差精度,但需要更强的处理能力。对于需要更快性能的应用,四分之一分辨率可能是更优选项
| 有关示例请观看教学视频 |
|
配置降噪参数
有几个参数会影响图像的噪声。
| 参数 | 描述 | 可能 值 |
推荐值 |
| 唯一性比率 | 最佳成本必须比第二最佳的成本高出一定的边际,才能被认为有效。增大此比率可以去除噪点,减少3D点的数量。 | 0 - 100 | 10 |
| 最大散斑尺寸 | 最大视差区域尺寸,用于判断噪声散斑并使其无效。 | 1 - N/A | 40 |
| 散斑阈值 | 在散斑过滤过程中,允许在连接组件内的最大视差变化 | 0 - 255 | 4 |
| 有关示例请观看教学视频 |
|
配置最小视差
最小视差可以通过扫描3D坐标偏移(Scan 3D Coordinate Offset)参数进行配置。这是将像素相对坐标转换为世界坐标时的偏移量。等同于最小视差。该值可以设置在0到768之间。对于远离相机的物体,使用较低值。对于靠近相机的物体,使用较高值。
| 有关示例请观看教学视频 |
|
配置立体惩罚项
小惩罚项(P1)是用于惩罚相邻像素之间视差变化为1像素的惩罚项。减小此参数有助于处理深度变化较慢的倾斜面。该值可以设置在1到255之间。默认值为5。减小P1值可以使深度过渡更加平滑,而增大P1值则减少对微小变化的敏感度。
大惩罚项(P2)是用于惩罚相邻像素之间视差变化大于1像素的惩罚项。减小此参数有助于处理深度变化较大的边缘区域。大惩罚项应大于小惩罚项。该值可以设置在1到255之间。默认值为60。增大P2值可以防止大幅度的视差跳变,减少噪声的同时使锐利边缘变得更加平滑。
| 有关示例请观看教学视频 |
|