Bringing Intelligence to Motion: Combining AI, Stereo Vision, and Edge Computing
In the world of industrial automation and robotics, motion control has always been defined by precision, speed, and reliability. However, as automation systems increasingly operate in unstructured, dynamic environments such as factories with human operators, warehouses with changing inventory layouts, surgical suites with organic movement, a new dimension is becoming critical: intelligence.
Enabling truly smart motion systems requires three technologies to converge: artificial intelligence (AI), 3D cameras, and edge computing. Together they allow machines not just to move accurately, but to also perceive, understand, and adapt to the world around them in real time.
Seeing the World in 3D: Why Stereo Vision Matters
Motion systems have traditionally relied on encoders, 2D cameras, or proximity sensors for feedback. These methods are useful for controlled environments but struggle to handle the unexpected.
Stereo vision fills that gap by generating a rich, dense 3D map of the environment in real time. Unlike LiDAR or ToF sensors, stereo cameras passively calculate depth by mimicking human vision, using image disparity to reconstruct the world in full depth. This makes them:
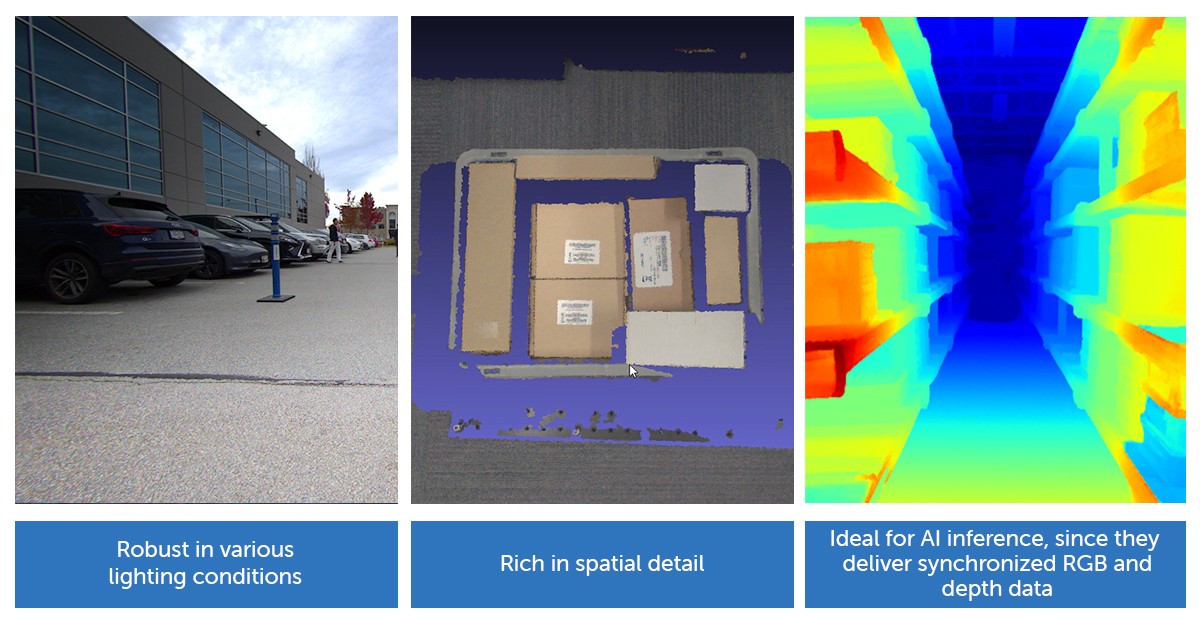
This is especially valuable in environments with variable lighting or where active illumination is impractical, like outdoor spaces, human-robot interaction zones, or mobile robotics platforms. Stereo vision’s passive design and rich visual context make it a preferred sensing modality for real-time AI applications.
From Vision to Action: The Role of AI
Once you have 3D data, the next step is to interpret it. That’s where AI models come in. Convolutional neural networks (CNNs), transformers, and reinforcement learning algorithms can be trained to:

In traditional systems, these kinds of tasks required hardcoded rules. With AI, the system can learn from real-world variation, improving over time and handling edge cases that rule-based logic cannot.
Processing at the Edge: Real-Time Without the Cloud
The final piece of the puzzle is edge computing. To respond to rapidly changing environments within milliseconds, AI-powered perception and control must occur on the robot or on-premises, not in the cloud.
This is where stereo vision systems like Bumblebee® X shine. Building on the trusted legacy of the original Bumblebee, the Bumblebee X continues to impress with robust factory calibration retention. This reliability is backed by a powerful FPGA-based stereo processing engine and an extended working distance of up to 20 meters, making it ideal for large-scale environments. With high-resolution depth output, an IP67-rated enclosure, and support for both real-time SGBM and advanced deep learning algorithms, Bumblebee X is the next-generation stereo vision solution for industrial robotics, inspection, and autonomous navigation. Its dual-path stereo processing architecture allows integrators to choose between:

This flexibility lets integrators balance between latency, accuracy, and compute cost based on the application, whether it’s a robotic arm doing precision pick-and-place, an AMR/AGV navigating a crowded unstructured warehouse, or a surgical robot adjusting to human tissue movement.
To learn more about how Bumblebee X works with deep learning algorithms, click here: Enhancing Stereo Depth Estimation with Deep Learning Techniques
Example Use Case: Intelligent Robotic Pick-and-Place and Outdoor Robotics

Imagine a robotic arm tasked with picking objects from a bin of unknown items. Traditional motion control struggles unless every object is known and fixed in place. With Bumblebee X feeding 3D data to an AI model, the robot can:
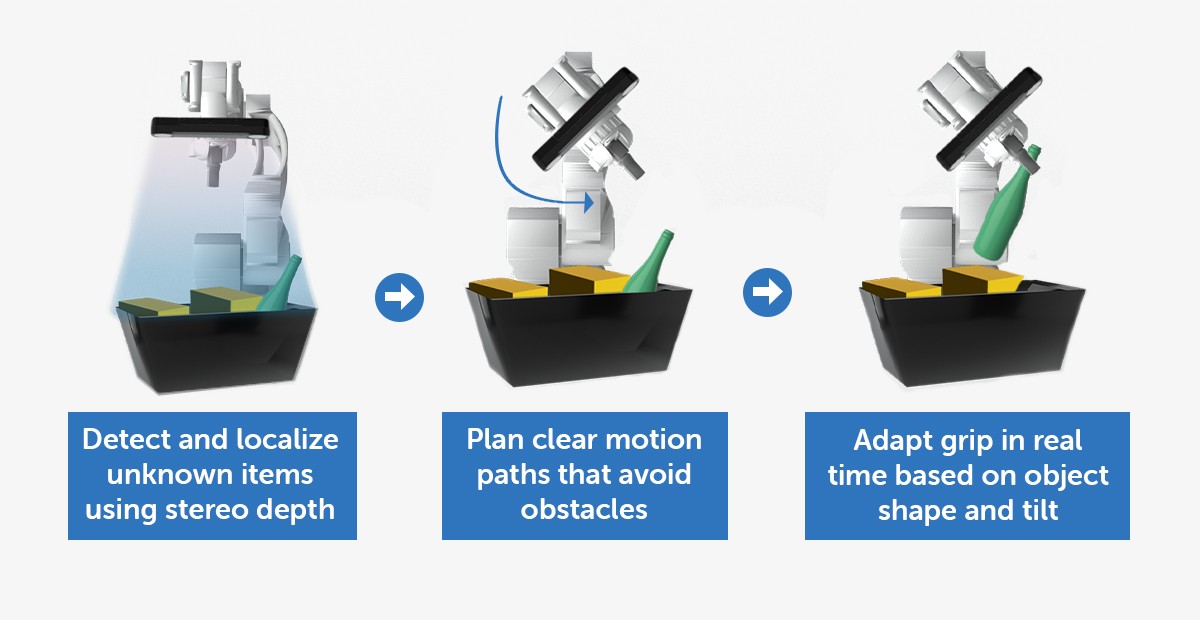
The result: faster cycle times, fewer errors, and the ability to handle variation without reprogramming.
Stereo vision is particularly well-suited for outdoor robotic applications due to its passive sensing nature, high spatial resolution, and robustness in varying lighting conditions. It enables autonomous robots to perceive and interpret complex terrain, detect obstacles without relying on active light sources, and maintain situational awareness in unstructured, natural environments. These are key capabilities for agriculture, construction, and remote inspection tasks. Click here to learn more: Bumblebee X Powers Taiga Robotics’ Mining Automation with AI-Driven Vision
Closing the Loop: The Future of Motion is Smart
We’re entering a new era of motion control, one where perception, cognition, and action are tightly coupled. Systems no longer just follow commands, they understand context, learn from experience, and adapt to new situations.
By combining AI, stereo vision, and edge processing, technologies like Bumblebee X are helping to close that loop, bringing us closer to the vision of truly intelligent machines.